
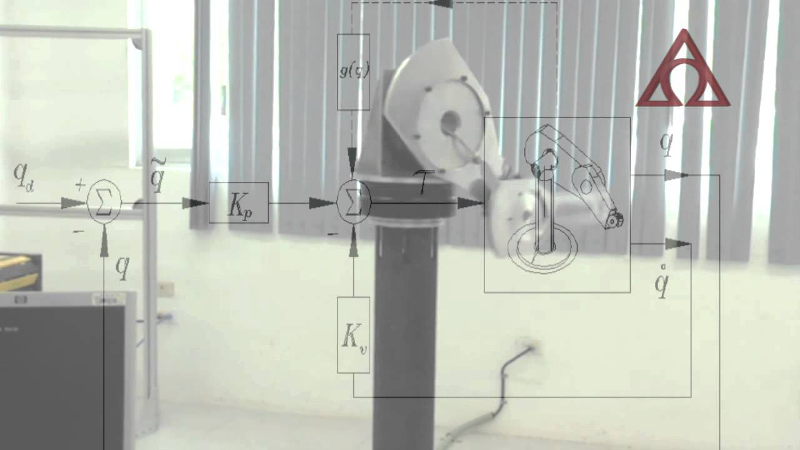
MATLAB APLICADO A LA ROBÓTICA Y MECATRÓNICA
A través del presente curso, se pretende aportar conocimientos al alumnado sobre robótica y mecatrónica, para ello en las diferentes partes del curso se pude ver.
-En la parte I de se presenta el lenguaje de programación de MATLAB y la implementación de los métodos numéricos empleados en robótica y mecatrónica.
-En la parte II se desarrollan librerías en código fuente de MATLAB para análisis y simulación de cinemática directa usando la metodología Denavit-Hartenberg de robots manipuladores y sistemas mecatrónicos;
-La parte III está dedicada a la simulación de la dinámica e identificación paramétrica de sistemas mecatrónicos y robots manipuladores; finalmente en la parte IV se presenta el uso de MATLAB en aplicaciones para regulación y control punto a punto de robots manipuladores usando el enfoque de moldeo de energía.
Destinatarios
Objetivos
Temario
Diploma acreditativo
Metodología
envíanos un eMail
Modalidades
- Presencial
- Semipresencial
- A distancia
- Online
Cursos similares
- INGENIERÍA ACÚSTICA
- INSTALACIONES DOMÓTICAS. ENTORNO Y DISEÑO DE PROYECTOS
- UF1771 OPERACIÓN LOCAL DE EQUIPOS Y SISTEMAS DE UNA CENTRAL HIDROELÉCTRICA
- UF1578 OPERACIONES DE PUESTA EN MARCHA Y PROTOCOLOS DE LA TUNELADORA DE SUELOS
- UF1476 PRUEBAS DE FUNCIONAMIENTO Y PUESTA EN MARCHA DE ASCENSORES Y OTROS EQUIPOS FIJOS DE ELEVACIÓN Y TRANSPORTE
Últimas convocatorias
-
 29/04/2024CURSO OFICIAL DE FORMACION AL PERSONAL OPERADOR DE APARATOS DE BRONCEADO ARTIFICIAL MEDIANTE RADIACCIONES ULTRAVIOLETAS en BERTAMIRANS
29/04/2024CURSO OFICIAL DE FORMACION AL PERSONAL OPERADOR DE APARATOS DE BRONCEADO ARTIFICIAL MEDIANTE RADIACCIONES ULTRAVIOLETAS en BERTAMIRANS -
 12/03/2024CURSO OFICIAL HIGIENICO-SANITARIO DE APLICADOR DE TATUAJES, MICROPIGMENTACION Y PIERCING en BERTAMIRANS
12/03/2024CURSO OFICIAL HIGIENICO-SANITARIO DE APLICADOR DE TATUAJES, MICROPIGMENTACION Y PIERCING en BERTAMIRANS -
 06/02/2024CURSO APLICADOR MANIPULADOR DE PRODUCTOS FITOSANITARIOS (NIVEL CUALIFICADO) en BERTAMIRANS - AMES
06/02/2024CURSO APLICADOR MANIPULADOR DE PRODUCTOS FITOSANITARIOS (NIVEL CUALIFICADO) en BERTAMIRANS - AMES -
05/02/2024CURSO OFICIAL HIGIENICO-SANITARIO DE APLICADOR DE TATUAJES, MICROPIGMENTACION Y PIERCING en BERTAMIRANS -AMES
-
 24/11/2023CURSO RENOVACION APLICADOR PRODUCTOS FITOSANITARIOS NIVEL CUALIFICADO en BERTAMIRANS - AMES
24/11/2023CURSO RENOVACION APLICADOR PRODUCTOS FITOSANITARIOS NIVEL CUALIFICADO en BERTAMIRANS - AMES -
 15/11/2023Curso Oficial Higienico-sanitario de Renovación de Aplicador de Tatuajes, Micropigmentación y Piercing en Bertamirans - Ames
15/11/2023Curso Oficial Higienico-sanitario de Renovación de Aplicador de Tatuajes, Micropigmentación y Piercing en Bertamirans - Ames -
 19/06/2023CURSO APLICADOR BIOCIDAS NIVEL ESPECIAL: TRATAMIENTO CON PRODUCTOS MUY TÓXICOS Y CARCINÓGENOS, MUTÁGENOS, TOXICOS PARA LA REPRODUCCIÓN (CMRs). en BERTAMIRANS - AMES
19/06/2023CURSO APLICADOR BIOCIDAS NIVEL ESPECIAL: TRATAMIENTO CON PRODUCTOS MUY TÓXICOS Y CARCINÓGENOS, MUTÁGENOS, TOXICOS PARA LA REPRODUCCIÓN (CMRs). en BERTAMIRANS - AMES -
29/05/2023CURSO RENOVACION DE CUALIFICADO DE APLICADOR / MANIPULADOR DE PRODUCTOS FITOSANITARIOS en BERTAMIRANS - AMES
INTEC es una entidad homologada, acreditada y certificada para impartir formación oficial
